Scott747 Posted October 6, 2016 Share Posted October 6, 2016 Just talked to him. 984. Link to comment Share on other sites More sharing options...
Bostonseminole Posted October 6, 2016 Share Posted October 6, 2016 this should get active http://www.hwn.org/tools/streaming-audio.html Link to comment Share on other sites More sharing options...
WishingForWarmWeather Posted October 6, 2016 Share Posted October 6, 2016 1 minute ago, Scott747 said: Just talked to him. 984. How's he doing, Scott? How are the folks in the ballroom/hallways faring? Link to comment Share on other sites More sharing options...
Windspeed Posted October 6, 2016 Share Posted October 6, 2016 Western Nassau is about to get blasted. Link to comment Share on other sites More sharing options...
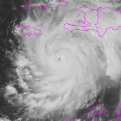
WishingForWarmWeather Posted October 6, 2016 Share Posted October 6, 2016 Gorgeous pinhole eye clearly visible on radar. Link to comment Share on other sites More sharing options...
Bostonseminole Posted October 6, 2016 Share Posted October 6, 2016 recon extrap down to 937.1 Link to comment Share on other sites More sharing options...
Drz1111 Posted October 6, 2016 Share Posted October 6, 2016 1 minute ago, Windspeed said: Western Nassau is about to get blasted. Fortunately the west half of New Providence is much less populated than the east. Link to comment Share on other sites More sharing options...
Scott747 Posted October 6, 2016 Share Posted October 6, 2016 6 minutes ago, WishingForWarmWeather said: How's he doing, Scott? How are the folks in the ballroom/hallways faring? No idea about the guests. We just talk briefly about heading and presentation. And he may have lapses if TWC is asking him to do a report. Link to comment Share on other sites More sharing options...
WishingForWarmWeather Posted October 6, 2016 Share Posted October 6, 2016 1 minute ago, Scott747 said: No idea about the guests. We just talk briefly about heading and presentation. And he may have lapses if TWC is asking him to do a report. Is he located on the western half of the island? Do y'all think he punches the core, or gets raked by eyewall only? Link to comment Share on other sites More sharing options...
JasonOH Posted October 6, 2016 Share Posted October 6, 2016 Looks like the winds need to catch up with the pressure. 4mb drop in 1 hour between these 2 passes. Link to comment Share on other sites More sharing options...
OSUmetstud Posted October 6, 2016 Share Posted October 6, 2016 Impressive. 133 kt wind on splashdown se eyewall. Link to comment Share on other sites More sharing options...
jojo762 Posted October 6, 2016 Share Posted October 6, 2016 Just now, JasonOH said: Looks like the winds need to catch up with the pressure. 4mb drop in 1 hour between these 2 passes. Winds aren't in too bad of shape, as recon had close to 140mph recently. Link to comment Share on other sites More sharing options...
OSUmetstud Posted October 6, 2016 Share Posted October 6, 2016 Extrap pressure and actual dropsonde pressure are not the same thing. The sfc pressure is approx 940mb on last pass. Extrap is tending to estimate a few mbs too low. Link to comment Share on other sites More sharing options...
Amped Posted October 6, 2016 Share Posted October 6, 2016 Yup Irene's winds were just trying to catch up to the pressure the whole time. Link to comment Share on other sites More sharing options...
Morris Posted October 6, 2016 Share Posted October 6, 2016 Just now, OSUmetstud said: Extrap pressure and actual dropsonde pressure are not the same thing. The sfc pressure is approx 940mb on last pass. Extrap is tending to estimate a few mbs too low. But the wind picked up crazily at the same time with the dropsonde. Link to comment Share on other sites More sharing options...
olafminesaw Posted October 6, 2016 Share Posted October 6, 2016 I don't know how well the HRRR handles TC tracks but, eesh. Link to comment Share on other sites More sharing options...
Seminole Posted October 6, 2016 Share Posted October 6, 2016 2 minutes ago, Morris said: Holy Cow. 3 mph under CAT 5 Link to comment Share on other sites More sharing options...
Hoth Posted October 6, 2016 Share Posted October 6, 2016 6 minutes ago, OSUmetstud said: Impressive. 133 kt wind on splashdown se eyewall. Unflagged? Link to comment Share on other sites More sharing options...
Hoth Posted October 6, 2016 Share Posted October 6, 2016 5 minutes ago, Amped said: Yup Irene's winds were just trying to catch up to the pressure the whole time. Irene had a lot of structural issues with ERC and dry air entrainment. Not the case here. Link to comment Share on other sites More sharing options...
Superstorm93 Posted October 6, 2016 Share Posted October 6, 2016 1 minute ago, Hoth said: Unflagged? When its a dropsonde, that means they released an actual instrument (with a parachute) that gets down to the surface. 133 knots would be the new intensity. Link to comment Share on other sites More sharing options...
OSUmetstud Posted October 6, 2016 Share Posted October 6, 2016 1 minute ago, Hoth said: Unflagged? As far as i know they dont flag dropsonds. They flag sfmr which is estimated from the plane...not directly measured. Link to comment Share on other sites More sharing options...
Hoth Posted October 6, 2016 Share Posted October 6, 2016 Just now, OSUmetstud said: As far as i know they dont flag dropsonds. They flag sfmr which is estimated from the plane...not directly measured. Ah, good to know. Many thanks. Link to comment Share on other sites More sharing options...
Ginx snewx Posted October 6, 2016 Share Posted October 6, 2016 2 minutes ago, Hoth said: Unflagged? Link to comment Share on other sites More sharing options...
jojo762 Posted October 6, 2016 Share Posted October 6, 2016 Just now, Ginx snewx said: A dropsonde is never flagged. Link to comment Share on other sites More sharing options...
KPITSnow Posted October 6, 2016 Share Posted October 6, 2016 So what are thoughts of how much intensity it loses as it progresses up the coast? Obviously if inland that knocks it down a bit, but what if it hugs with the eye going on and offshore? i would think that would be a worst case scenario. Link to comment Share on other sites More sharing options...
hlcater Posted October 6, 2016 Share Posted October 6, 2016 1 minute ago, Ginx snewx said: 150kts 930mb. Whew. At 940mb 930mb is not far up. Link to comment Share on other sites More sharing options...
dan11295 Posted October 6, 2016 Share Posted October 6, 2016 Look at those winds just above the surface. 151 kt at 930 mb Link to comment Share on other sites More sharing options...
jh28wd40 Posted October 6, 2016 Share Posted October 6, 2016 I wonder is that 500 ft? 50 Ft? hmmm... That's insane.. Link to comment Share on other sites More sharing options...
Amped Posted October 6, 2016 Share Posted October 6, 2016 How do you get 937mb from 941mb with 10 knot winds? Link to comment Share on other sites More sharing options...
Jenkins Posted October 6, 2016 Share Posted October 6, 2016 150kts 930mb. Whew. At 940mb 930mb is not far up. What would be the altitude at 930 with 940 slp? Back of the envelope calculation yielded ~310 ft. Feel free to correct me. Link to comment Share on other sites More sharing options...

Recommended Posts
Archived
This topic is now archived and is closed to further replies.